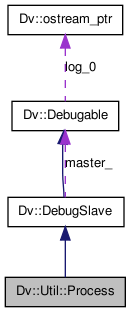
Dv::Util::Process Class Reference
A class representing a process. More...
#include <process.h>
Public Types | |
| enum | { NO_EXIT_STATUS = -2 } |
| enum | Status { DEAD, RUNNING, FINISHED, STOPPED, SIGNALED, CONTINUING } |
Process status. More... | |
Public Member Functions | |
| Process (const std::string &command="", unsigned int min_debug_level=1) | |
| Create a new process object. | |
| int | start () throw (std::runtime_error, std::logic_error) |
| Start up a new process. | |
| pid_t | pid () const |
| const std::string & | command () const |
| int | exit_status () const |
| int | signaled () const |
| bool | killed () const |
| bool | stopped () const |
| void | signal (int signal, const std::string &error_message) const throw (std::runtime_error) |
| Send a signal to this process. | |
| void | stop () const throw (std::runtime_error) |
| Send a SIGSTOP signal to this process. | |
| void | resume () const throw (std::runtime_error) |
| Send a SIGCONT signal to this process. | |
| void | kill () const throw (std::runtime_error) |
| Send a SIGKILL signal to this process. | |
| Status | wait () const |
| Wait for process to finish. | |
| Status | status () const |
| Return current process status. | |
| virtual | ~Process () |
| Destructor. | |
Protected Member Functions | |
| Status | status (int s) const |
Convert a status provided by waitpid to a Status, possibly setting exit_status_ and signal_. | |
| Status | wait (bool nohang) const |
Wrapper around waitpid. | |
Protected Attributes | |
| pid_t | pid_ |
| This is protected so that subclasses can set it. | |
Private Member Functions | |
| Process (const Process &) | |
| Process & | operator= (const Process &) |
Private Attributes | |
| std::string | command_ |
| int | exit_status_ |
| int | signal_ |
Detailed Description
A class representing a process.
It supports signaling and obtaining status. Note that the constructor does not start up the process, for that one should implement a subclass, with a constructor doing the fork() etc. An example function that can be used to do this is available in Dv::Util::Process:start.
Example:
Dv::Util::Process proc("ping www.bla.com"); proc.start(); std::cout << proc.status() << std::endl; sleep(2); proc.stop(); // stop (not kill) the process by sending STOP signal sleep(2); proc.resume(); // resume the process sleep(2); if (impatient) proc.kill(); // send KILL signal else proc.wait(); // wait for process to actually finish
Definition at line 35 of file process.h.
Member Enumeration Documentation
Process status.
- Enumerator:
DEAD doesn't exist anymore
RUNNING also after resuming
FINISHED finished normally, exit_status available
STOPPED received SIGSTOP signal
- See also:
- Process::stop()
SIGNALED e.g.
using SIGKILL,
CONTINUING unused, could be supported under Linux 2.6
Constructor & Destructor Documentation
| Dv::Util::Process::Process | ( | const std::string & | command = "", |
|
| unsigned int | min_debug_level = 1 | |||
| ) |
Create a new process object.
This function does not start up the process; this job is left to subclasses or, alternatively, to Dv::Util::Process::start. It simply stores the command to be executed. Example:
Dv::Util::Process proc("ping www.bla.com"); proc.start();
- Parameters:
-
command to be executed by the process. If empty, one can use Dv::Util::Process:start to have the process execute a function in the current program. min_debug_level for when the object is connected to a debug master
- See also:
- Dv::Util::Process:start
- Dv::Debugable
| virtual Dv::Util::Process::~Process | ( | ) | [virtual] |
Destructor.
If the process is still RUNNING or STOPPED, it will be killed.
| Dv::Util::Process::Process | ( | const Process & | ) | [private] |
Member Function Documentation
| int Dv::Util::Process::start | ( | ) | throw (std::runtime_error, std::logic_error) |
Start up a new process.
- Returns:
- pid iff the process is running
- 0 in the child process if the process is not running a command
- Exceptions:
-
std::runtime_error if fork()failed.std::runtime_error if execl()failed.std::logic_error if the process is already running
- If the process command is not empty, it will be executed using Example:
/bin/sh -c exec command
Dv::Util::Process proc("ping www.bla.com"); proc.start();
- If the process command is empty, a fork() will be executed and the function will return false in the child process. This supports code such as the following.
Dv::Util::Process p; if (! p.start()) return f(...); // in the child p.wait(); // in the parent
- See also:
- Dv::Util::Process::Process
Reimplemented in Dv::Util::iopstream.
| pid_t Dv::Util::Process::pid | ( | ) | const [inline] |
| const std::string& Dv::Util::Process::command | ( | ) | const [inline] |
| int Dv::Util::Process::exit_status | ( | ) | const [inline] |
- Returns:
- exit status (-1..255) of a process that terminated normally (i.e. was not signaled).
- Warning:
- If the process did not return normally or is still running, NO_EXIT_STATUS will be returned.
Definition at line 105 of file process.h.
References exit_status_.
| int Dv::Util::Process::signaled | ( | ) | const [inline] |
| bool Dv::Util::Process::killed | ( | ) | const |
- Returns:
- true iff the process was killed using a SIGKILL signal
- See also:
- Dv::Util::Process:kill
| bool Dv::Util::Process::stopped | ( | ) | const |
- Returns:
- true iff the process was stopped using a SIGSTOP signal
- See also:
- Process::stop
| void Dv::Util::Process::signal | ( | int | signal, | |
| const std::string & | error_message | |||
| ) | const throw (std::runtime_error) |
Send a signal to this process.
- Parameters:
-
signal to send error_message to be used when throwing an exception
- Exceptions:
-
std::runtime_error if kill(_,_)returns -1, e.g. if the process does not exist anymore because it has already been killed or waited upon.
| void Dv::Util::Process::stop | ( | ) | const throw (std::runtime_error) |
Send a SIGSTOP signal to this process.
- Exceptions:
-
std::runtime_error inherited from Dv::Util::Process::signal
- See also:
- Dv::Util::Process::signal
| void Dv::Util::Process::resume | ( | ) | const throw (std::runtime_error) |
Send a SIGCONT signal to this process.
- Exceptions:
-
std::runtime_error inherited from Dv::Util::Process::signal
- See also:
- Dv::Util::Process::signal
| void Dv::Util::Process::kill | ( | ) | const throw (std::runtime_error) |
Send a SIGKILL signal to this process.
- Exceptions:
-
std::runtime_error inherited from Dv::Util::Process::signal
- See also:
- Dv::Util::Process::signal
| Status Dv::Util::Process::wait | ( | ) | const [inline] |
| Status Dv::Util::Process::status | ( | ) | const [inline] |
| Status Dv::Util::Process::status | ( | int | s | ) | const [protected] |
Convert a status provided by waitpid to a Status, possibly setting exit_status_ and signal_.
- Parameters:
-
s status provided by waitpid
- Returns:
- status of process
| Status Dv::Util::Process::wait | ( | bool | nohang | ) | const [protected] |
Wrapper around waitpid.
- Parameters:
-
nohang if true, waitpid will not wait for the process to finish but just report the latest status change, if any.
- Returns:
- current process status
Member Data Documentation
pid_t Dv::Util::Process::pid_ [protected] |
std::string Dv::Util::Process::command_ [private] |
int Dv::Util::Process::exit_status_ [private] |
Definition at line 186 of file process.h.
Referenced by exit_status().
int Dv::Util::Process::signal_ [private] |
Definition at line 187 of file process.h.
Referenced by signaled().
The documentation for this class was generated from the following file: